
振动与噪声控制研究所始建于1985年,2010年更名为振动与噪声控制研究所,自“七五”开始,实验室完成了多项国家军用车辆重点预研课题和国家纵向科研课题,先后主持国防973、国家自然科学基金、国防预研项目等国家级项目。研究所现有实验面积551平方米,包括万元以上的试验设备50余台。研究所现有专职教师12人,博士后3人,在读博士生5人,在读硕士生34人。公开发表著作20部,公开发表论文360余篇,其中EI检索论文160余篇,SCI检索论文110余篇。授权国家发明专利65项,获省部级一等奖2项、二等奖3项、三等奖2项等。
研究所主要科研方向如下:
1. 车辆振动控制方法研究
以提高车辆NVH品质为目标,开展了越野机动性评估性模型、路面特征识别技术研究、车辆智能悬架技术等方面研究,研制了车辆半主动悬架系统。
1.1. 装备越野机动性评估性模型构建
开展土壤动态承载模型研究,构建装备—地面牵引特性数学模型,利用地面级差划分技术,构建越野地面谱功率密度函数,明确装备越野通过、机动性的评价指标,构建装备越野通过、机动性评估模型。
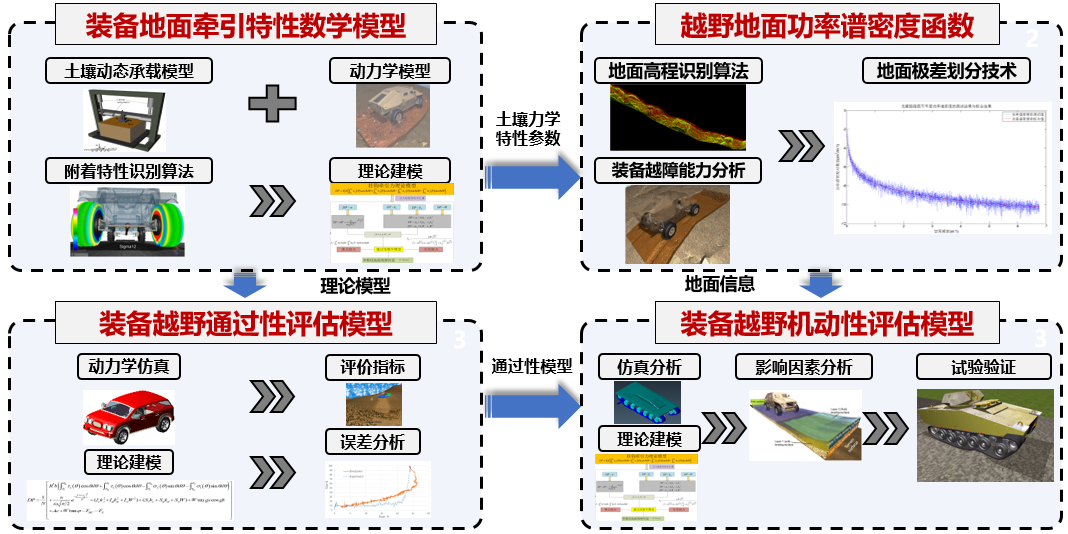
图1 装备越野机动性评估性模型构建
1.2. 基于车辆动力学响应的路面特征辨识方法
开展车辆时变行驶速度下的轮地接触特性、多变路面激励与车辆动力学响应的耦合机制研究,提出具有广泛适用性的路面识别方法,搭建路面不平度特征辨识系统与硬件测试平台,实现路面不平度的高鲁棒性准确识别。
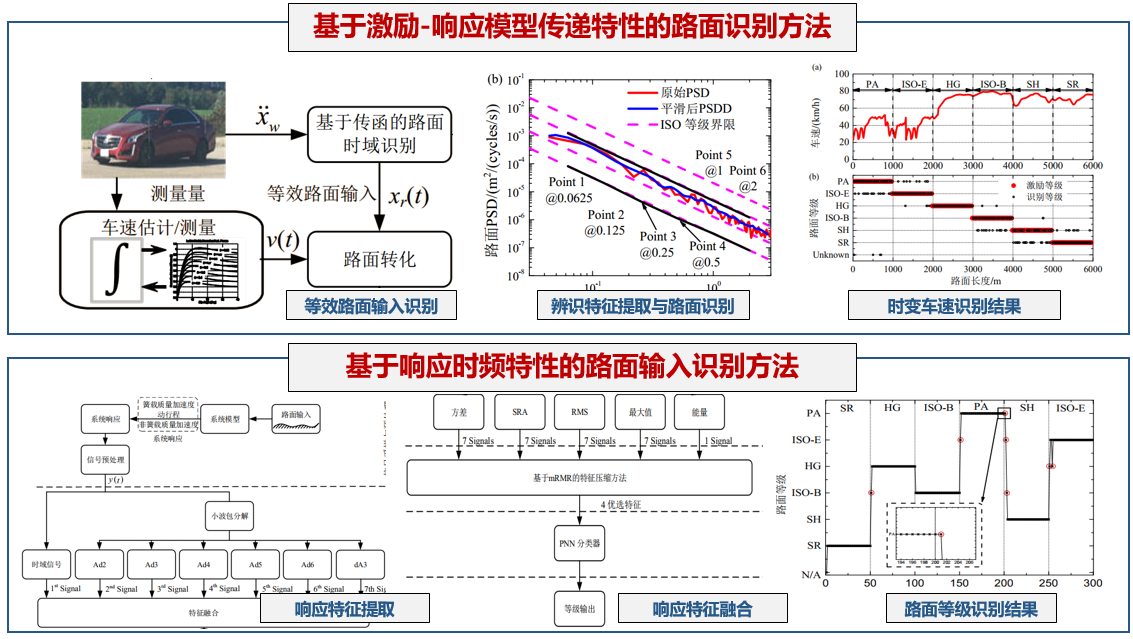
图2 基于车辆动力学响应的路面特征辨识方法
1.3. 智能悬架控制方法
开展智能阻尼减振机理与控制策略、虚拟样机与特性分析、自适应智能悬架控制算法研究工作,开发了智能控制系统硬件并进行性能测试,实现可控悬架系统动力学性能提升。
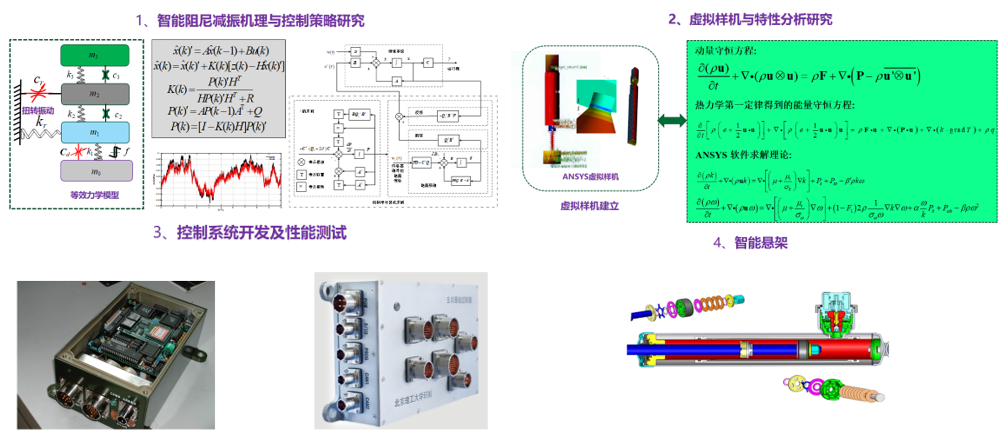
图3 智能悬架控制方法
2. 智能车辆动力学控制与评价
围绕智能车辆动力学控制提升与客观评价方法需求,开展了智能车辆规划-跟踪集成方法、主动转向控制、自动脱困、智能车辆测试评价等方面研究。
2.1. 规划-跟踪集成一体化控制方法
开展考虑动力学约束的规划-控制集成控制框架、基于多行驶目标切换的模型预测控制策略以及复杂场景下差异化行驶目标量化评价方法,形成了复杂场景下的规划-跟踪集成一体化控制方法。
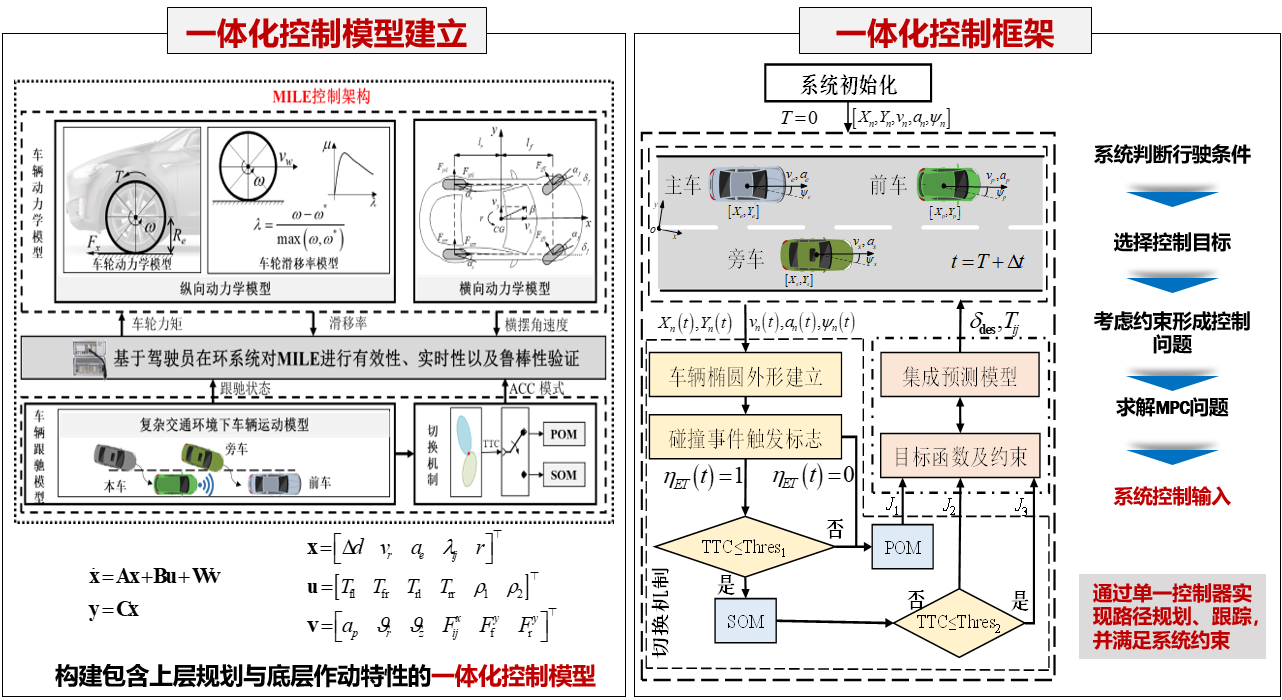
图4 规划-跟踪集成一体化控制方法
2.2. 重载特种车辆转向系统控制
开展了特种车辆多体系统耦合机制研究、智能化重载商用车辆转向优化控制以及底盘一体化综合控制方法研究,开发了特种车辆转向控制算法与控制器。
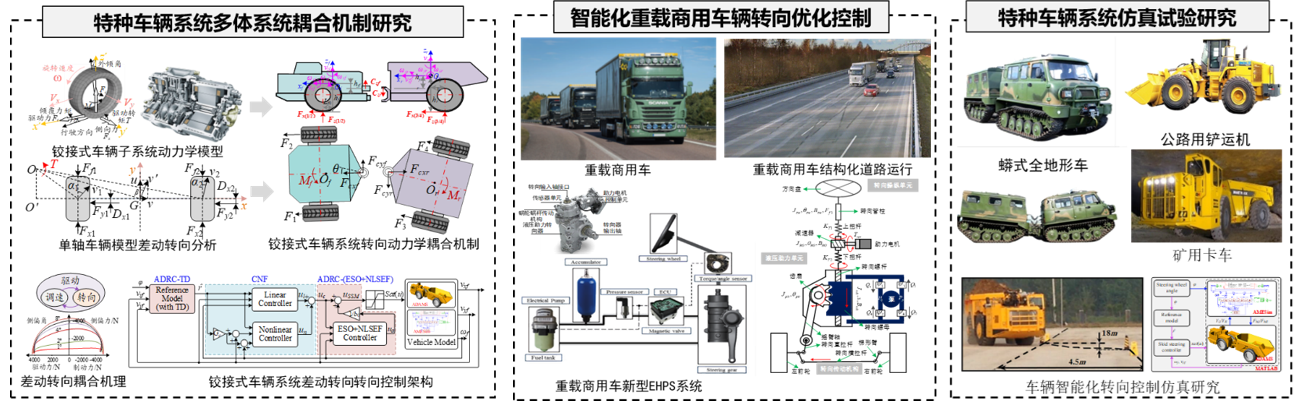
图5 重载特种车辆转向系统控制
2.3. 车辆自动脱困控制研究
开展了爆胎、碰撞等极限工况下车辆自动脱困研究,剖析了极限工况下车辆运动力学特性,发展了基于多项式理论的车辆自动脱困轨迹规划方法,提出了计及道路交通环境的人机协同脱困分层控制方案,开展了驾驶人在环的虚实结合试验验证工作。
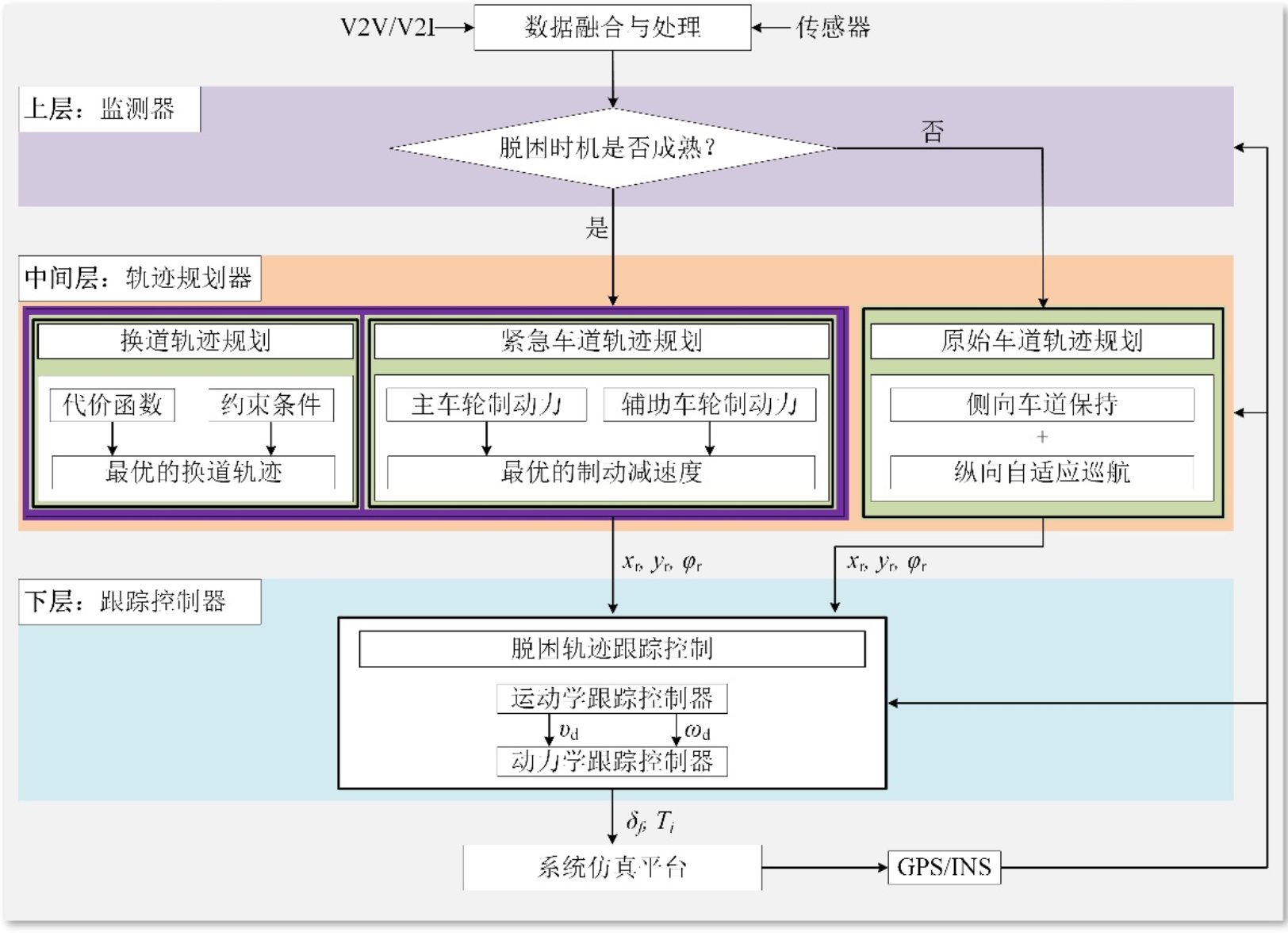
图6 智能车辆自动脱困运动控制方案
2.4. 人机交互及协同机理
围绕人机协同控制权分配问题,从人-车-路闭环作用下的驾驶人风险响应操控规律出发,探索了驾驶人风险响应机制驱动的人机协同全向运动控制方案;剖析危险工况驾驶人风险响应机制,进一步依据驾驶人风险响应操控偏差设计人机协同纵侧向的全向辅助控制权。
2.5. 智能车辆测试评价
针对智能车辆行驶环境和驾驶任务复杂,并存在人为干预以及驾驶智能程度的差异,研究基于信息熵理论的智能车辆智能水平综合测评方法。
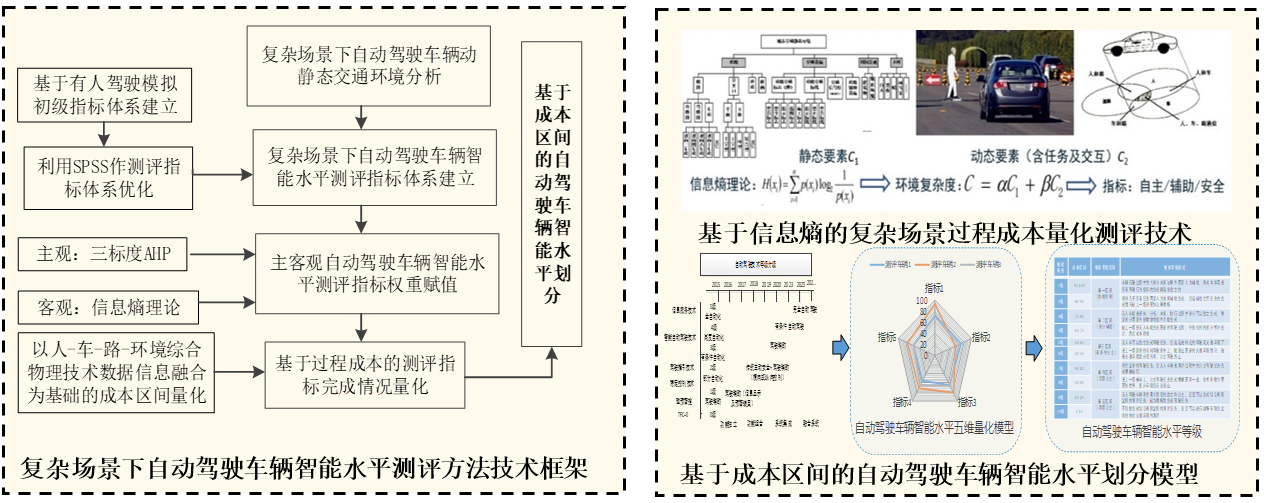
图7 智能车辆测试评价
2.6. 智能车辆环境适应性量化评估
研究智能车辆环境复杂度量化分级方法,确定环境适应性影响因素及其评估指标,建立智能车辆运行全过程复杂环境适应性量化评估模型,构建智能车辆环境适应性量化评估方法。
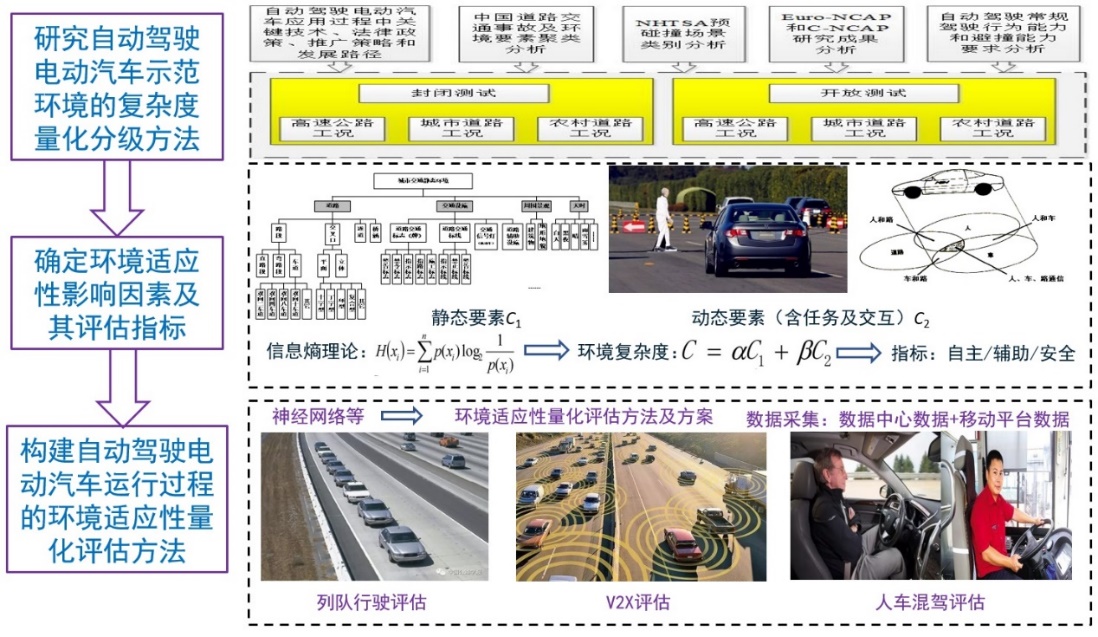
图8 智能车辆环境适应性量化评估
2.7.智能车辆行驶状态多源数据采集及融合
研究对复杂场景下智能车辆行驶状态数据异源、异质和异步的特点,采用车路协同路侧数据采集和多传感器数据采集移动平台相结合的多源数据获取方式;采用深度学习对多源异构、异质和异步数据进行融合处理。
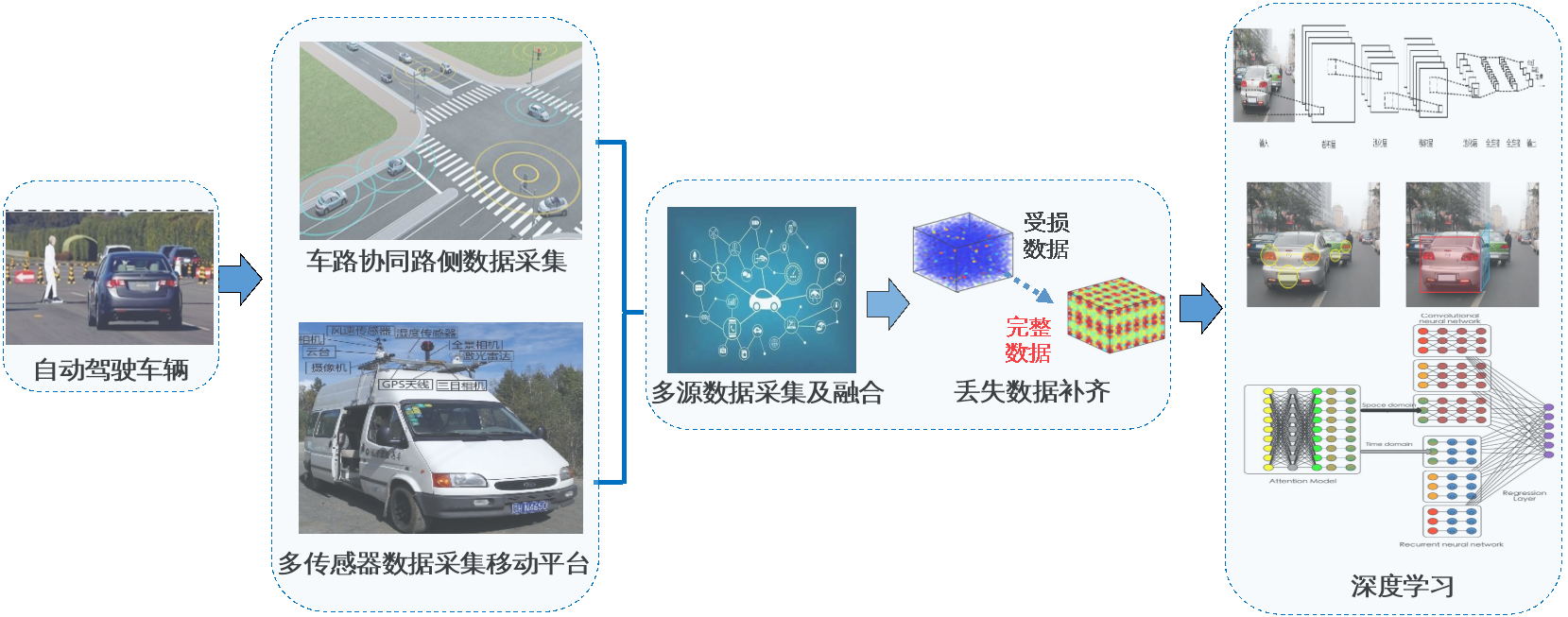
图9 智能车辆行驶状态多源数据采集及融合
3.车辆故障诊断与智能运维
瞄准车辆装备信息化与智能化需求,开展了车辆动力传动系统的故障诊断与智能运维理论及技术研究,研究工作涵盖了动力传动系统的故障动力学机理建模、复杂非平稳信号分析与微弱特征提取、关键部件的特征学习与智能故障诊断等,开发了典型机电设备的健康管理与智能运维软硬件平台等。
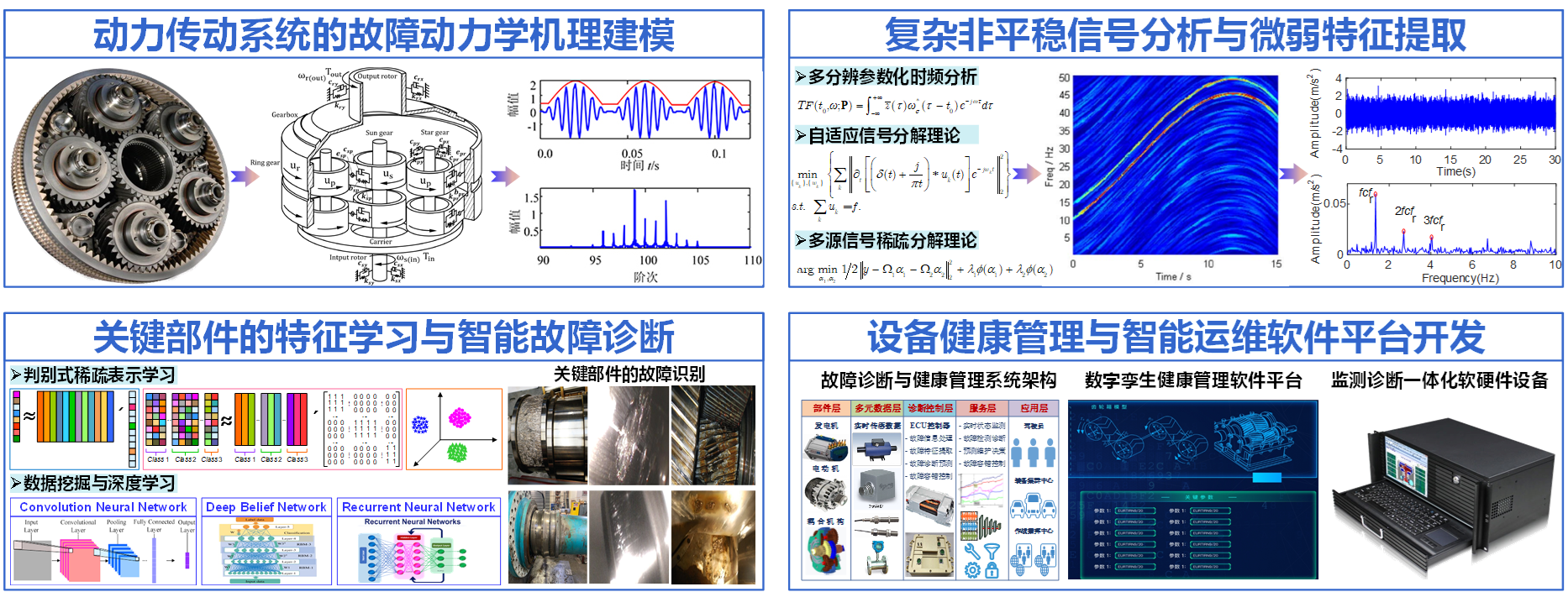
图10 车辆故障诊断与智能运维
4.高性能镁燃料电堆:
针对镁金属燃料电池空气电极成本高无法量产,且其内部物理、化学内阻过高,导致放电效率低下以及产物无法回收等问题,重点开展了无贵金属空气电极量产制备技术、低内阻高效电池单体技术以及高性能电堆级联技术方面的研究,实现了镁金属空气电池低成本空气电击的批量化生产,通过低内阻电池单体的高效级联,形成了以高性能镁金属燃料电池为基础的储能装备平台。
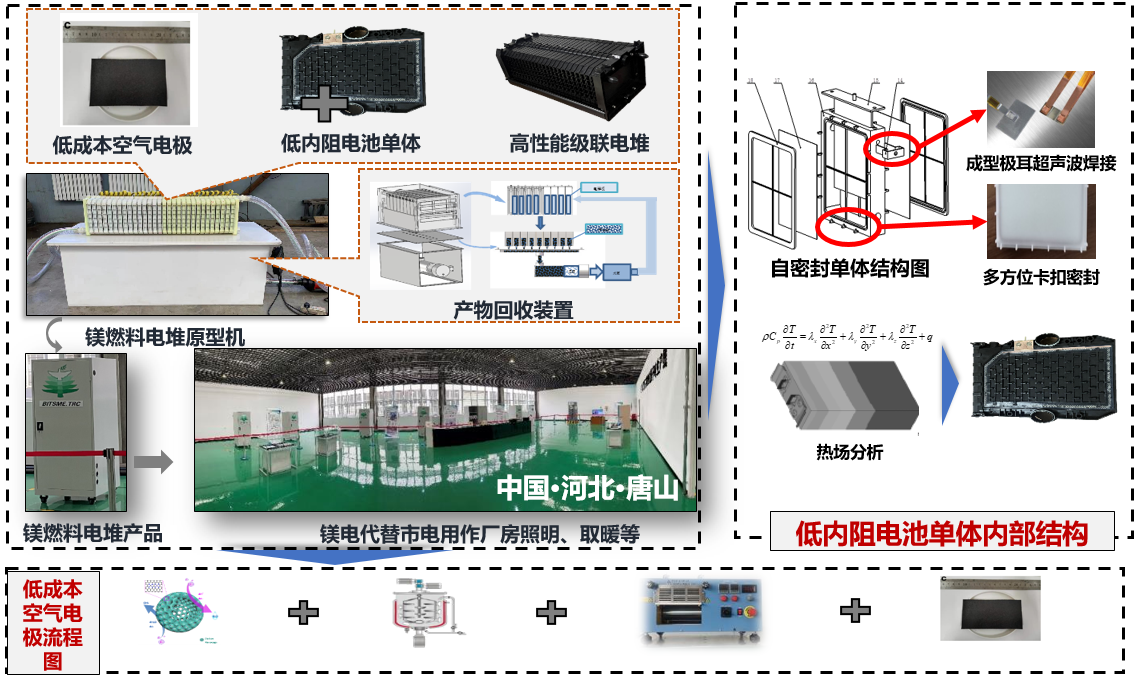
图11 高性能镁燃料电堆
5. 激光增材制造飞行器结构力学特性研究
以飞行器结构轻量化为目标,开展了飞行器结构增材制造技术研究,探究三维点阵结构的宏观力学性能与内部细微观胞元的几何构造、分布特征和变形模式的映射关系,通过三维点阵胞元几何构型设计和分布特征调控,实现宏观结构的高承载、高吸能和强韧化。
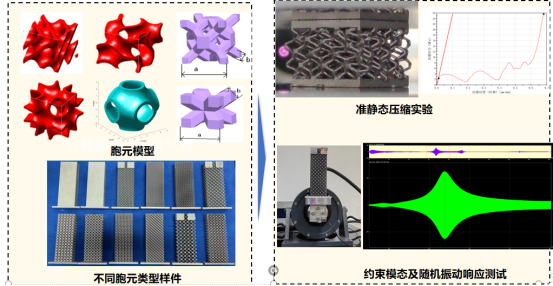
图12 激光增材制造飞行器结构力学特性研究
6.研究所实验室建设
振动与噪声控制研究所在必赢线路检测3003中关村校区建有单轮道路模拟试验台,激励频率0.02~80Hz,行程300mm,总推力130kN,具备输出任意类型波形组合或实测路谱的能力。此外,实验室还具有驾驶员在环测试以及多无人车试验平台。


图13 中关村校区部分实验设备
研究所在必赢线路检测3003西山校区建有四立柱道路激励模拟系统,能够进行整车道路模拟耐久性试验、车辆悬架参数测定;并可根据已知加速度进行RPC迭代试验。激励模拟系统的前轴额定动态推力100 kN;后轴额定动态推力220 kN,行程:400 mm,具备输出任意类型波形组合或实测路谱的能力,频响范围0~100 Hz,4头同时激振速度:0~2 m/s,适用车辆轴距2000~6500 mm,轮距1200~2500 mm。

图14 西山校区大型实验设备
振动与噪声控制研究所主要科研人员
姓名 |
岗位名称及职责 |
研究领域 |
导师类型 |
邮箱 |
所长 |
振动主动控制、燃料电池 |
博导/硕导 |
vdmm@bit.edu.cn |
|
副所长(科研) |
振动主动控制、智能车辆动力学 |
博导/硕导 |
qinyechen@bit.edu.cn |
|
副所长(教学) |
智能车辆动力学 |
硕导 |
xutao@bit.edu.cn |
|
副所长(实验室) |
振动主动控制 |
硕导 |
huanghua@bit.edu.cn |
更新时间:2023年11月